PIC Microcontroller Assembly – Fibonacci
PIC 8-bit Microcontroller Assembly
I’m currently working on a project that I need a basic micro-controller for. I’m exploring potential options, and have some PIC chips on hand that I’d like to make use of so I’m considering using a PIC12F629, by Microchip.com. I’ve found the Microchip documentation and community to be quite helpful in getting started. It’s as simple as:
- Download & install MP Lab X IDE: http://www.microchip.com/mplab/mplab-x-ide
- Download & install an XC compiler: http://www.microchip.com/mplab/compilers
- Peruse the PIC12F69 documentation: http://ww1.microchip.com/downloads/en/devicedoc/41190c.pdf
- Read Page 9, 10 (Memory layout)
- Read Page 21, 22 (I/O Pin config)
- Read Page 71 (Instruction Set Summary)
- Refer to Page 72 (Instruction Table)
I’m interested in understanding the lowest level operation of the chip, so I’ve started with writing assembly instead of C. Here is a short and simple implementation of a Fibonacci sequence generator. Since this is an 8-bit chip, the maximum number I’m able to represent is 255, but for convenience of detecting the end of the generator, I end on the 16th step, which also demonstrates the 8-bit overflow.
; PIC 12F629 Register Addresses
#define INDF 0x00
#define STATUS 0x03
#define RP0 0x05 ; STATUS<RP0> bit selects the bank
#define FSR 0x04
#define GPIO 0x05 ; bank 0
#define TRISIO 0x05 ; bank 1
; Global Variables
#define TMP1 0x31
#define TMP2 0x32
#define FIB 0x20 ; fibonacci seq array
RES_VECT CODE 0x0000 ; processor reset vector
GOTO START ; go to beginning of program
; TODO ADD INTERRUPTS HERE IF USED
MAIN_PROG CODE ; let linker place main program
START
bcf STATUS, RP0 ; select Bank 0
; Build the fibonacci sequence in a memory block
movlw 0x20 ; start at 0x20
movwf FSR ; set the indirect addressing address
; Initialize sequence with 0,1
movlw 0x00 ; F_0
movwf TMP1 ; store it in working var
movwf INDF ; store it in memory block
incf FSR ; increment the File Select Register
movlw 0x01 ; F_1
movwf TMP2 ; store it in working var
movwf INDF ; store it in memory block
incf FSR; ; increment the File Select Register
; Continue the sequence from F_2 on
NEXT
; Add the two last numbers
movf TMP1,0 ; W = TMP1
addwf TMP2,0 ; W = W + TMP2
movwf INDF ; store W in data block at FSR
; update TMP1 and TMP2.. .tmp1=tmp2, tmp2=W
movf TMP2,0 ; W = TMP2
movwf TMP1 ; TMP1 = W
movf INDF,0 ; W = Value at FSR
movwf TMP2 ; TMP2 = W
incf FSR ; increment the File Select Register
btfss FSR, 4 ; skip goto when bit 4 of FSR is 1, eg FSR = 0bx1xxxx
goto NEXT
END
Here is a screenshot of the memory management tool in the MP Lab IDE’s simiulator:
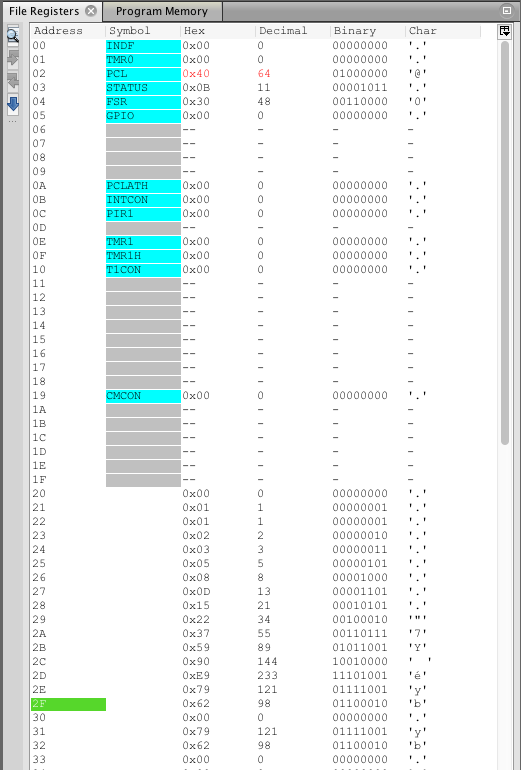
Fibonacci Sequence Generator, simulation memory map
Surely there are easier, more efficient, and/or more compact ways of writing this generator, but this is my naïve first attempt.
Robot Arm, Chess Computer Vision
The game of chess is one of the world’s most popular two-player board games. I often times find myself wanting to play even when no one is around to play. One solution to this problem is to play chess on a computer or mobile device against. However, many people would agree with me in thinking that playing a virtual game of chess is a completely different experience than playing a physical game of chess. For this reason, I intend to use this project as an opportunity to build a 6 degree of freedom robotic arm that will take the place of an opponent in a physical game of Chess. The state of the game will be determined by applying chess computer vision algorithms to images from a camera that will be mounted above the game board facing down.
The Setup
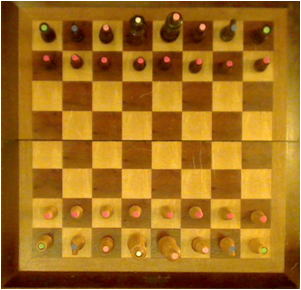
Chessboard
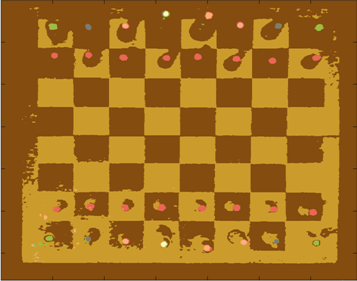
The chessboard used for this project is a standard wood chess board with 64 tiles, and 32 pieces.

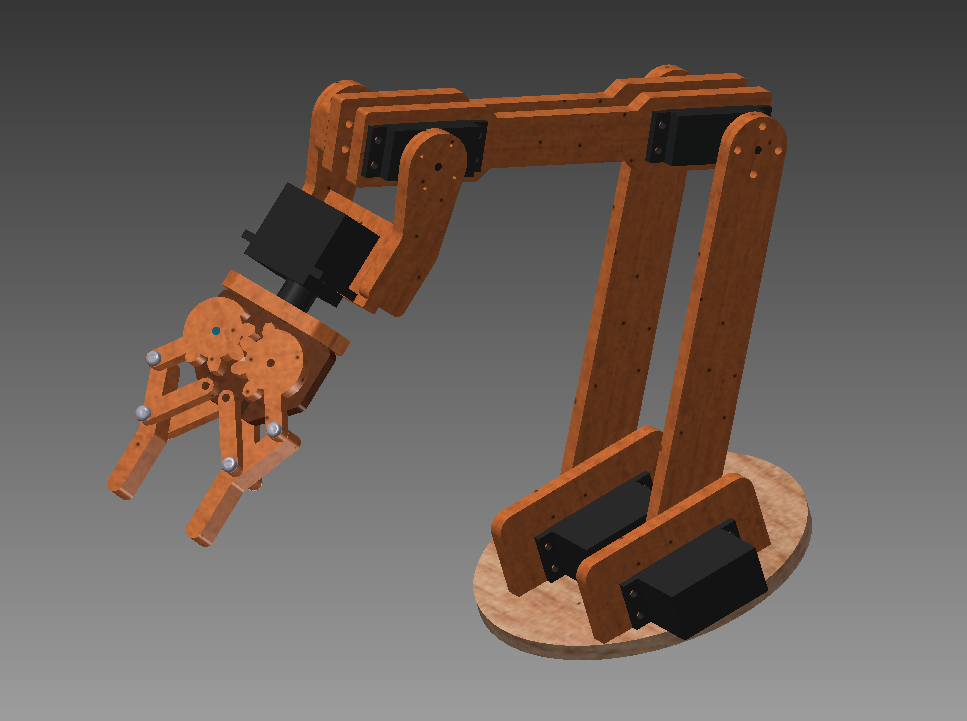
The Robot Arm
I designed a 3R spatial manipulator in Autodesk Inventor 2013 and constructed the arm out of medium density fiber board. The joints are controlled by 7 servos connected to an Arduino microcontroller. I wrote a simple program for the Arduino that processes incoming serial commands that tell it joint positions in degrees.
Arm Design in Inventor

Autodesk Inventor design of a 3R 6DOF robot arm manipulator

MDF Constructed 3R Robot Arm
Camera Calibration
I calibrated by personal webcam for this project. The MATLAB Camera Calibration Toolbox was used to determine the intrinsic calibration parameters of my camera. I was surprised to find that my camera has very little radial distortion.
Distortion Example
The web cam introduces very little radial distortion, as can be seen by the images below
|
Distorted Image from Webcam |
After Undistortion |
 |
 |
Chess Computer Vision
My low target for this project is to identify the chessboard. I have managed to detect a calibration chessboard, and a real chess board. I did a little math to find the centers of the tiles which will be my starting point for determining if a piece is occupying the tile. For detecting the board I made use of libcbdetect.
Examples of Detected Chessboards
In these examples, the chess board has been identified and the centers of the tiles have been marked.
|
Black and White Calibration Chess Board |
Real Chess Board |
 |
 |
Potential Problem – Height of Chess Pieces and Perspective
One problem I ran into is that the height of some the Chess pieces causes the colored markers to appear outside of the tiles that the piece is in. This is due to the camera’s perspective on the scene. I reduced the extent of this problem by increasing the camera’s distance from the board.
Finding the Pieces
In order to identify the pieces from the top-down perspective provided by the camera, I attached colored pieces of paper to the top of each chess piece. In chess, each of the two players begins with 16 pieces, spanning 6 different classes. I assigned each of the 6 classes a unique color and attached hole-punched pieces of paper to the tops of each piece. The color of the piece of paper is used to determine the class of piece, while the color of the piece is used to determine if the piece belongs to player 1 or player 2.
The pieces are mapped to colors as follows:
| Chess Piece | Color |
| Pawn | Red |
| Rook | Green |
| Knight | Blue |
| Bishop | Pink |
| Queen | White |
| King | Orange |
LAB Color Space
In order to effectively discriminate color, I had to find a color space that lent itself to this. I found that the LAB color space is common for color discrimination because it is more perceptually linear than other color spaces. To test its discriminative qualities for the purposes of this project, I took a few color samples of the potential colors for chess pieces and plotted them in LAB space. Here are three slices of the LAB space with varying L-values:

Here is a 3D plot of the color samples:
Color Identification
Color identification turned out to be quite a bit more difficult that I originally thought it would be. The variations in lighting caused a significant amount of variance in the detected colors. In order to capture the variance of the colors due to small variations in lighting I fitted color samples to Gaussian mixture models.
For each color, I collected samples of the color from images of the board with varying illumination and fitted the samples to a 3D Gaussian mixture model. Here is a depiction of the fitted Gaussians in LAB space. Each color is represented by a single Gaussian.
Segmenting Images by Color
In order to separate pieces from the board, I segmented the images based on pixel colors. To segment the image, I begin by converting an input image to the LAB color space. Then, for each pixel in the image, I compute the Mahalanobis distance from the pixel to each color’s Gaussian mixture model representation. I then find nearest Gaussian to the pixel and map the pixel to the color represented by said Gaussian.
Example Segmentation
| Input Image | Segmented Image |
 |
 |
From this point, I can easily isolate specific colors from the image.
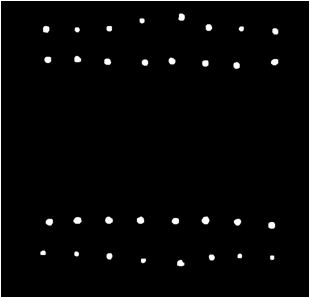
Connected Component Blobs
Once the image is segmented, I calculate a binary mask that represents the locations of all of the chess pieces. I then perform morphological closing and opening to clean up the image and remove noisy color segmentation. Continuing with the output from the color segmentation above, here is the resulting binary mask of chess pieces:
This example contains perfect segmentation, but this isn’t always possible. For example, here is a noisy segmentation:
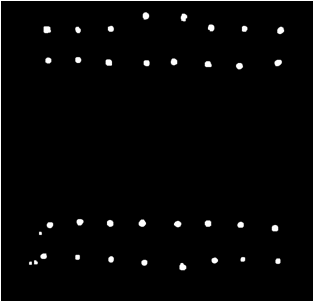
Usually noise results in blobs that are smaller than the actual chess pieces, so I remedied this problem by processing the blobs in order of decreasing size.
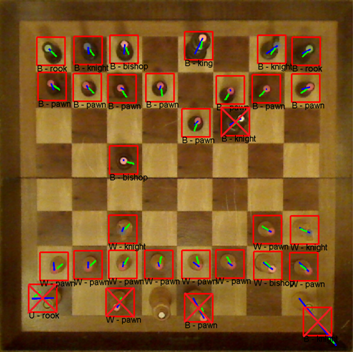
Identifying Pieces
To determine the class of piece for each blob detection I pull the index of the color of the isolated blob from the segmented image. Once the class of piece is detected, I must detect which players piece it is; black or white. Determining if the piece is black or white is accomplished by analyzing color samples along a line from the centroid of the blob to the center of the chess board. I only collect samples that are right outside the edge of the color blob, because this is the location where black or white pixels are.
For example, here is a detected white pawn. The blue line represents the offset from the center of the detected blob to the tile center. The green line represents the locations where color samples were collected for determining if the piece is white or black.

Here are examples of chess piece classification. From the images below, it is clear that variations in lighting cause problems for the classification process. I may be able to build a more robust model for representing the colors by using more color samples across a wider range of illuminations. It may be worthwhile to consider using Gaussian mixture models with more mixture components per color.
Correct Classification:

Incorrect Classification:
Problems
Here are some of the problems I ran into during this project.
- Variations in Lighting
- Possible Solutions:
- Use more diverse color samples for GMM’s
- Use multiple Gaussians per color
- Possible Solutions:
- Real-time
- Webcam auto adjustments (focus, lighting)
- Chess board & Pieces
- Glossy finish causes color misclassification
linux command to chmod directories to 755, chmod files to 644
Here are two simple unix commands to chmod directories to 755 (drwxr-xr-x), while chmod’ing files to 644 (-rw-r–r–).
find . -type d -print0 | xargs -0 chmod 0755 # for directories find . -type f -print0 | xargs -0 chmod 0644 # for files
Rationale behind the naming of the Unix file system hierarchy
Have you ever wondered the origins of unix directory names, like /etc, /usr, /var, … ?
Today I came across a PDF explaining the rationale behind the naming of Unix file system hierarchy.
Here is a link to the PDF: http://www.pathname.com/fhs/pub/fhs-2.3.pdf
Robotic Arm 3R
I’m currently in the process of designing a robotic arm in Autodesk Inventor 2013. The design is based largely off of Google image searches for robotic arms. This is my first time using Inventor to create something that is actually useful. Here is a screenshot of my current progress.
Recursive md5sum of Files in Directory
Calculating the md5 sum of a file is useful for verifying transfers, checking for changes, etc.
This command can be used to recursively scan through a directory calculating md5sum’s for each file:
find . –type f –print0 | xargs –0 md5sum
Example output:
dan@dk01:/usr/local/lib$ find . -type f -print0 | xargs -0 md5sum 3f4b60def4965a65a8ba74d6bfb705af ./libopencv_nonfree.so.2.4.2 cbddb8854f5038283fc8a50be44531e9 ./libv4l2.so.0 cb6d070e09dd5e95c78402901d5208ad ./libswresample.so.0.15.100 d019c220c7214bf709b5073eb7730f9d ./libavdevice.so.54.2.100 0da4b285acd5d6dff73dd1143ca5864d ./libswresample.a f302fb887de867e903e70de4ba56d4de ./libopencv_core.so.2.4.2 4ad325f7d0c0828aa7ba72f62135e935 ./libavdevice.so.54.0.100 268f814fcce9913773814fce8de216c7 ./libpostproc.so.52.0.100 790eade5ba41a9afdc28d434587a94ec ./libv4l1.so.0 128d7d2286e5d59fafc8e56728bdbf2e ./libopencv_features2d.so.2.4.2 cd2dc23377d519ea29d57c95983ead2c ./libavfilter.so.2.77.100 8034f30e406473844620b50177a9fdc7 ./libavfilter.a 740361c12d3d2206c45ad59504eecd03 ./libopencv_legacy.so.2.4.2 bee0be81c7b3b1518ff03a3ad7ba5a05 ./libswscale.so.2.1.100 7d08940cb3ba9ce18a3ceb0c4bfacf19 ./libv4l/ov511-decomp e02ff7015998829cb7734ec44b7047ea ./libv4l/ov518-decomp 2b8044e5cf4c0e7de6e7a3fadda8a598 ./libv4l/v4l1compat.so
Create list of installed packages (Linux)
To create a list of installed packages in linux:
dpkg –get-selections > installed-software
If you wanted to use the list to re-install this software on a fresh linux setup:
dpkg –set-selections < installed-software dsel
Eye Tracking via Webcam
The mouse has undoubtedly become an integral part of personal computing as we know it. Be it a laptop or a desktop, it seems no workstation is complete without a keyboard and mouse. But just how efficient is it to use a mouse to control a cursor? What if you could control your mouse cursor with just your eyes? You would never have to take your right hand (or left) off the keyboard! It’s a simple idea, and it makes sense.
When moving the cursor, I’ve noticed that people usually do one of two things:
- They follow the cursor with their eyes until it reaches the intended destination (where they want to click), or
- They look at the intended destination (where they want to click) and wait for their hand to get the cursor there.
I’d say #2 is more common among frequent computer users, but either way, there is a delay between deciding what to click and actually getting the cursor there to click it. The summation of this lag time certainly adds up. I’d have to do a little more thinking to come up with a rough estimate of just how much time could be saved, but this isn’t my motivation. My motivation is the fact that this is just a really cool and inexpensive-to-test idea.
The Idea
So anyway, the idea is to be able to determine where exactly on the screen the user is looking just by examining the position of the eyes (as seen from a webcam). But what about clicks? Well, click events could be triggered by many things; maybe a quick head nod, an emphatic blink, or simply a dedicated key on the keyboard. There are many possible solutions for triggering left/right/middle mouse clicks. I’ll just have to try out various methods and see which ones work the best.
Source: Unknown
A simple Google search will show that extensive research has already been done on the topic of eye tracking. However, it seems that modern approaches require the user to wear some sort of head gear to track eye movement. This can be costly, inconvenient, and likely requires a less-than-trivial amount of calibration –The exact opposite of the convenience that humans naturally seek.
This idea may be better suited for laptops than desktops, because majority of laptops today have built in webcams. Webcams that can’t move relative to the screen. This means extrinsic camera calibration would only need to be performed once per laptop. However, with standalone webcams (commonly used with desktop computers) it may be necessary to recalibrate every time the webcam is moved -or even bumped for that matter.
Applications
Aside from the convenience of being able to move a cursor with just your eyes, this technology has potential for many applications. One of which is analyzing what us humans spend the most time looking at when shown pictures, videos, or text. A heat map can be generated to represent areas of an image (or a website) that someone is most interested in. This has been done in many variations in the past, but providing a way for this analysis to be performed by consenting users in the comfort of their own homes (without fancy headgear) could certainly lead to an expansion in this field of research.
Conclusion
I still need to do more research on the topic. I may find that the required precision/accuracy needed for effectively controlling a mouse cursor with eye-movement alone is beyond the reach of current webcams.
Interesting Notes
- I may also be able to determine how close a user is sitting to the computer monitor (within a reasonable degree of error). This can be calculated as the height of the triangle formed by two eyes and a point of interest on screen. Assuming, of course, that the user is focusing on point that lies on the plane defined by the computer screen.
Projective Chirp

- (a) In image processing, direct periodicity seldom occurs, but, rather, periodicity-in-perspective is encountered.
- (b) Repeating structures like the alternating dark space inside the windows, and light space of the white concrete, “chirp” (increase in frequency) towards the right.
- (c) Thus the best fit chirp for image processing is often a projective chirp.
Full Article: http://en.wikipedia.org/wiki/Chirp
Possibly Worthwhile Reads
Getting People to Use Statistics Properly
This may be a worthwhile read. It was written in 1978, revised in 1979, so it may be a bit dated. View Article…
The Flesch Reading Ease Score
Reader’s Digest magazine has a readability index of about 65, Time magazine scores about 52, an average 6th grade student’s (an 11-year-old) written assignment has a readability test of 60–70 (and a reading grade level of 6–7), and the Harvard Law Review has a general readability score in the low 30s. The highest (easiest) readability score possible is around 120 (e.g. every sentence consisting of only two one-syllable words). Read On…
more to come..